

 QQ
QQ

ABB机器人手动操纵线性运动
机器人的线性运动是指安装在机器人第六轴法兰盘上的工具在空间中作线性运动。如果对使用操纵杆通过位移幅度来控制机器人运动的速度不熟练的话。那么可以使用“增 量”模式,来控制机器人运动。在增量模式下,操纵杆每位移一次,机器人就移动一步。如果操纵杆持续一秒或数秒钟,机器人就会持续移动(速率为每秒10步)。
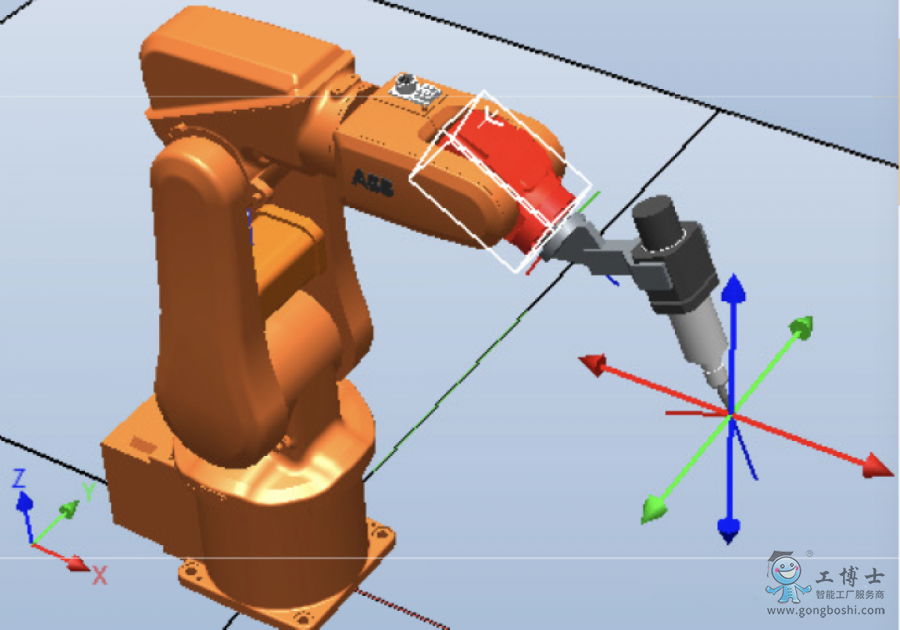
ABB机器人的手动操纵重定位运动
机器人的重定位运动是指机器人第六轴法兰盘上的工具TCP点在空间中绕着工具坐标系旋转的运动,也可理解为机器人绕着工具TCP点作姿态调整的运动。如果对使用操纵杆通过位移幅度来控制机器人运动的速度不熟练的话。那么可以使用“增量”模式,来控制机器人运动。在增量模式下,操纵杆每位移一次,机器人就移动一步。如果操纵杆持续一秒或数秒钟,机器人就会持续移动(速率为每秒10步)。

了解更多ABB机器人
文章来源网络,如有侵权请联系删除
- 下一篇:ABB机器人基础操作设置说明
- 上一篇:ABB机器人50056关节碰撞报警处理
